
(7) 相對 ─ 動量、質量、能量守恆
牛頓的動量守恆
回顧一下我們以前在牛頓的動量
\[P = m\frac{dx}{dt}, \quad x \text{:spatial vector}\]其中 $x$ 是只有空間的向量。
常見例子就是考慮兩個粒子碰撞,碰撞前後碰撞後的動量會守恆
\[m_1 \frac{dx_1}{dt_1} + m_2 \frac{dx_2}{dt_2}\Bigg|_{\text{before}} = m_1 \frac{dx_1}{dt_1} + m_2 \frac{dx_2}{dt_2}\Bigg|_{\text{after}}\]伽利略轉換
這個動量守恆主要是在實驗座標系測量的,去紀錄兩個粒子各自在碰撞前後的位置和相差時間所得。
現在假設有一個觀察者從實驗室外看,他不做這些實驗,直接把我們的實驗數據做伽利略轉換,那我們還能得到動量守恆嗎?
已知伽利略轉換公式
\[\begin{cases} x' = x - vt\\ t' = t \end{cases}\]帶進動量的定義
\[\frac{dx'}{dt'} = \frac{dx - vdt}{dt} = \frac{dx}{dt} - v\]繼續計算
\[m_1 \frac{dx_1'}{dt_1'} + m_2 \frac{dx_2'}{dt_2'}\Bigg|_{\text{before}}\\ = m_1 \Bigl(\tfrac{dx_1}{dt_1} - v\Bigr) + m_2 \Bigl(\tfrac{dx_2}{dt_2} - v\Bigr)\\ = \left(m_1\tfrac{dx_1}{dt_1} + m_2\tfrac{dx_2}{dt_2}\right)\Bigg|_{\text{before}} - (m_1 + m_2)v\]又牛頓的動量守恆我們知道碰撞前和碰撞後相等,所以
\[= \left(m_1\tfrac{dx_1}{dt_1} + m_2\tfrac{dx_2}{dt_2}\right)\Bigg|_{\text{after}} - (m_1 + m_2)v\]然後又繼續推導回來的話會得
\[= m_1 \frac{dx_1'}{dt_1'} + m_2 \frac{dx_2'}{dt_2'} \Bigg|_{\text{after}}\]因此即便在primed frame的觀察者座標系下,動量守恆定律仍然滿足,牛頓和伽利略是互相自洽的。
\[m_1 \frac{dx_1'}{dt_1'} + m_2 \frac{dx_2'}{dt_2'} \Bigg|_{\text{before}} = m_1 \frac{dx_1'}{dt_1'} + m_2 \frac{dx_2'}{dt_2'} \Bigg|_{\text{after}}\]相對論的動量守恆
但是如果我們現在維持動量的定義是只有空間的向量,那麼假設現在是高速的實驗,我們用勞倫茲轉換,依然還能得到動量守恆嗎?
已知勞倫茲轉換
\[\begin{cases} x' = \gamma (x - vt)\\ t' = \gamma \left(t - \frac{v}{c^2}x\right) \end{cases}\]計算
\[\frac{dx'}{dt'} = \frac{\gamma(dx - vdt)}{\gamma\left(dt - \frac{v}{c^2}dx\right)} = \frac{\frac{dx}{dt} - v}{1 - \frac{v}{c^2}\frac{dx}{dt}}\]可以看到分母多了一項,所以如果重複前面的計算,我們會發現無法得到碰撞前後的守恆公式!
\[m_1 \frac{dx_1'}{dt_1'} + m_2 \frac{dx_2'}{dt_2'} \Bigg|_{\text{before}} \neq m_1 \frac{dx_1'}{dt_1'} + m_2 \frac{dx_2'}{dt_2'} \Bigg|_{\text{after}}\]修正的思路
至此我們會有兩種修正思路
- 動量守恆其實只有在一般低速(牛頓)的情況下才成立,高速下不會有。
- 動量守恆在高速下還是要成立,只是我們對「動量」的定義要稍微修改一下。
兩種思路都可以,但我們現在選擇了第二種,仍然相信動量守恆是fundamental law,來看動量能不能稍作修改後就滿足。
改變動量定義
那我們要如何修改呢?
勞倫茲轉換其實告訴我們一種幾何特性,如轉動來說,座標系即便轉動,但想要測量的某個向量仍然在那裏,其「長度」不變,只是用不同的座標描述他,並且有一個測量這個長度的公式符合轉動前後的座標系。
勞倫茲轉換雖然畫圖來看不是轉動,也能找到一個類似於轉動長度的不變量,並用Minkowski的恆等公式去描述他。
那麼在做勞倫茲轉換時的座標是怎麼描述的呢?
就不再只是空間而已,是space-time,四度空間的向量。
而時間我們就用 proper time,這樣不論是在哪個座標系都能夠統一。
因此我們重新定義一個粒子的動量
然後接下來我們想要證明,這樣定義的動量,在經過勞倫茲轉換之後,也能維持守恆。
\[\vec{P}_1 + \vec{P}_2\Big|_{\text{before}} \overset{?}{=} \vec{P}_1 + \vec{P}_2\Big|_{\text{after}}\]時空動量幾何化
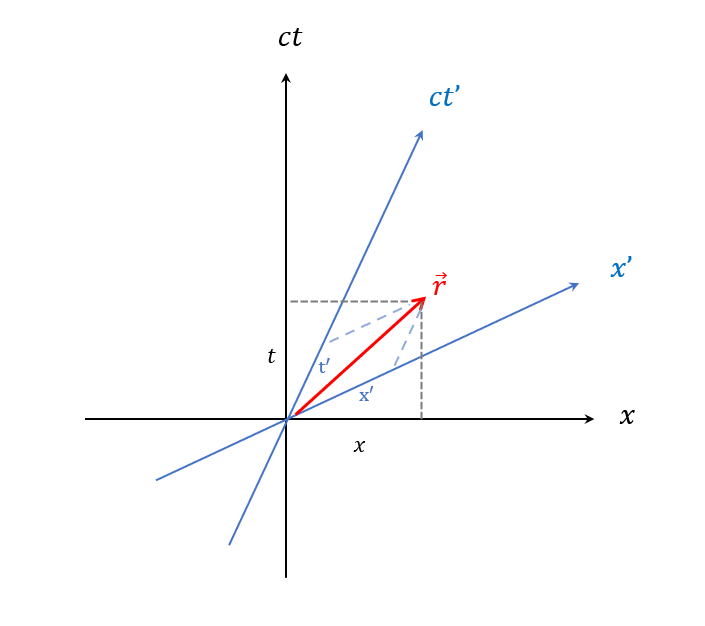
現在我們來畫圖,紅色向量$\vec{r}$是現在四度時空下的抽象幾何向量,有起點和終點兩個事件,而這個物理問題我們各自用黑色和藍色的座標系去描述他,就是$(t,x), (t’ ,x’)$。
接著先來計算 proper time
\[-c^2 d\tau^2=-c^2dt^2+dx^2\\ \Rightarrow d\tau = \sqrt{dt^2-\frac{1}{c^2}dx^2}=dt\sqrt{1-\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2}\\\]空間分量
現在是四度時空,我們先只取空間的component來看。
\[m\frac{dx}{d\tau} = \frac{m dx}{dt\sqrt{1-\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2}}\\ = m\frac{\frac{dx}{dt}}{\sqrt{1-\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2}}\]低速近似:古典牛頓力學的動量守恆
若是這個粒子移動的速度沒有很快,那分母第二項就趨近於零,分母為1,整個就可以近似於
\[\approx m\frac{dx}{dt}\]就是我們常見的牛頓力學的動量,滿足上述說的牛頓力學動量守恆(低速近似)。
Spatial part of the assumed conserved quantity indeed reduces to the familiar momentum of Newtonion mechanics in the low speed limit.
引發的問題
剛剛提到我們已經要改變動量的定義,要用的是「時空」,是四維的,但現在我們只有用空間的部分,還是維持三維的,x,y,z各自分別動量守恆。
那這樣我們在重新定義動量守恆,用這樣幾何化的概念,多了一個維度出來那要怎麼辦?多出來守恆量?
那多出來的這個,是我們錯了?不該幾何化?還是幾何的概念仍然可行,多的這一個守恆量也是對的,只是我們以前不知道而已。
在這裡,我們相信第二個,相信物理定律是幾何化的,然後接著來看看,這個多出來的另外一個向量究竟代表什麼?
時間分量
直接上公式
\[P_0\equiv m\frac{dt}{d\tau} = \frac{m dt}{dt\sqrt{1-\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2}}= \frac{m}{\sqrt{1-\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2}}\]低速近似:質量守恆
若是這個粒子移動的速度沒有很快,那分母第二項就趨近於零,分母為1,整個就可以近似於
\[P_0\approx m\]沒錯,就是質量!那這樣在碰撞前後
\[m_1 + m_2\Big|_{\text{before}} = m_1 + m_2\Big|_{\text{after}}\]阿不就是質量守恆!
所以剛剛擔心的也不是什麼大問題,多出來時間維度計算的守恆量,在低速近似的牛頓世界中也不是什麼新的東西,就是我們熟悉的質量守恆(但我筆記到這裡感覺實在很驚奇XD)。
一階近似:動能守恆
好吧那我們現在再多看一點,來個一階近似,也就是分母做二項式展開
\[\sqrt{1-\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2}\approx 1+\frac{1}{2}\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2\]加號前面的1就是我們剛剛在計算的質量守恆,所以來看展開的第二項
\[\frac{m_1}{2}\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2 + \frac{m_2}{2}\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2\Bigg|_{\text{before}} = \frac{m_1}{2}\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2 + \frac{m_2}{2}\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2\Bigg|_{\text{after}}\]阿!這不就是總動能守恆嗎!
幾何化的意義
整理一下,我們最前面是用只有牛頓空間的三維動量守恆 –> 幾何化 –> 四維時空描述後,一個東西的空間分量代表古典牛頓的動量守恆,時間分量代表著質量、動能守恆!
相對論下的動量及能量表示
既然如此,我們時間分量的動量定義
\[m\frac{dt}{d\tau} = m \frac{1}{\sqrt{1-\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2}}\]其實就可以代表著移動中粒子的總能量。
\[E=\frac{mc^2}{\sqrt{1-\frac{1}{c^2}\left(\frac{dx}{dt}\right)^2}}\](這裡把$c^2$乘回來,只是恢復能量因次。)
所以我們定義相對論性的空間動量和能量分別為
\[P_\text{spatial}=\frac{mu}{\sqrt{1-\frac{u^2}{c^2}}},\quad E=\frac{mc^2}{\sqrt{1-\frac{u^2}{c^2}}}\]其中
\[u=\frac{dx}{dt}\]進一步地,算一下
\[(P_\text{spatial} c)^2 = \frac{m^2u^2c^2}{1-\frac{u^2}{c^2}}\\ E^2 = \frac{m^2c^4}{1-\frac{u^2}{c^2}}\\ E^2 - (P_\text{spatial} c)^2 = \frac{m^2c^4 - m^2u^2c^2}{1-\frac{u^2}{c^2}} = \frac{m^2c^4(1 - \frac{u^2}{c^2})}{1-\frac{u^2}{c^2}} = m^2c^4\\ \Rightarrow E^2 - (pc)^2 = (mc^2)^2 \Rightarrow E^2 = (pc)^2 + (mc^2)^2\]討論:$mc^2$ 就是能量?
在剛剛能量的公式中,若是速度取0,$E=mc^2$,看起來很像靜止有質量的東西待在那裏就有能量,但目前只是推導結果看起來有數值在這裡,因次是能量,但不敢馬上真正說$mc^2$就是能量。
在愛因斯坦之前,古典電磁學已經有能量和質量有關係的概念,因為電磁場具有能量。假設我們推一顆帶電的球,他會受到自己的電磁場效應影響,計算發現加速度不是熟悉的力除以已知的質量,而是反過來用力除以加速度算出某個有效的質量,得到這個有效的質量表示是乘以$c^2$以及一個不是1的factor(而在這裡愛因斯坦推導完之後factor=1)。
所以其實早在之前就多少有種感覺能量和質量是有點關係的。
不過這節沒有要講能量和質量互換的事情,只是在說有運動數值的時候,能量就會增加,然後扣掉沒有速度的能量,這個增加量再取低速近似,就會恢復牛頓的動能表示$\frac{1}{2}mv^2$。
討論:有速度質量變大?有效質量及靜止質量的差別?
同樣剛剛的討論,相對論性的能量發展之後,早期的物理學家也覺得有運動的時候能量會增加,沒運動的時候$mc^2$,那何不把這個能量的增加理解為:有運動有速度的時候,質量變大了。
$m$是不運動的質量,有速度$u$的時候$\frac{m}{\sqrt{1-\frac{u^2}{c^2}}}$當作是新的相對性的質量。
但是現代的說法已經不採取這樣的說法。
質量就是一個粒子的intrinsic property,就是這個$m$(以前叫做靜止質量),現在就叫質量。
而$\frac{m}{\sqrt{1-\frac{u^2}{c^2}}}$也不叫做相對性的質量,質量有了別的概念,因為質量我們知道是力量除以加速度,如果一個粒子沿著某個方向運動,用同樣的力不同方向推造成的加速度不一樣,這樣的算出來的質量也就不同。
如此一來,定義的相對性的質量就不好用了,因為不同方向的力會有不一樣的效果。
所以現在定義的質量,就是必須跟著粒子運動,在粒子的瞬間運動座標系,用$m=F/a$,怎麼除都是同一個數值,就是這個粒子的intrinsic mass。
而$\frac{1}{\sqrt{1-\frac{u^2}{c^2}}}$就只是一個factor。
相對論下的力量表示及功能定理
以前學過功能定理,這裡不討論任何位能場,就是力量乘以位算作功,改變粒子的動能。而我們現在要計算的就是要定義出和座標系有關的力量表示。
這裡就不推導了,直接講答案
\[F=\frac{d}{dt}\left(\frac{mu}{\sqrt{1-\frac{u^2}{c^2}}}\right)\]驗證一下
\[\begin{align} F\cdot dx &= \frac{d}{dt}\left(\frac{mu}{\sqrt{1-\frac{u^2}{c^2}}}\right)\cdot dx\\ &= d \left(\frac{mu}{\sqrt{1-\frac{u^2}{c^2}}}\right)\cdot \frac{dx}{dt}\\ &= u\cdot d\left(\frac{mu}{\sqrt{1-\frac{u^2}{c^2}}}\right)\\ &=d\left(u\cdot\frac{mu}{\sqrt{1-\frac{u^2}{c^2}}}\right)-\frac{mu}{\sqrt{1-\frac{u^2}{c^2}}}\cdot du\\ &=d\left(\frac{mu^2}{\sqrt{1-\frac{u^2}{c^2}}}\right)-\frac{m}{2}\frac{1}{\sqrt{1-\frac{u^2}{c^2}}}du^2\\ &=d\left(\frac{mu^2}{\sqrt{1-\frac{u^2}{c^2}}}\right)+\frac{mc^2}{2}d\left(2\sqrt{1-\frac{u^2}{c^2}}\right)\\ &=d\left(\frac{mu^2}{\sqrt{1-\frac{u^2}{c^2}}}+mc^2\sqrt{1-\frac{u^2}{c^2}}\right)\\ &=d\left(\frac{mu^2+mc^2\left(1-\frac{u^2}{c^2}\right)}{\sqrt{1-\frac{u^2}{c^2}}}\right)\\ &=dE \end{align}\]驗證對啦~
\[E=\frac{mc^2}{\sqrt{1-\frac{u^2}{c^2}}}\]勞倫茲轉換
最後提一下,我們新定義的動量
\[\vec{P}\equiv m\frac{d\vec{r}}{dt}\]$\vec{r}$的空間和時間的分量都可以在不同的座標系下用勞倫茲轉換$(t,x), (t’,x’)$,$d\vec{r}$也是~
不過proper time $d\tau$是不變量,所以要用$(\frac{E}{c^2}, P_\text{spatial})$作勞倫茲轉換。