
(1) 變分入門 ─ 怎麼算兩點之間最短距離?
在學習變分的時候,常會看到least action principle、Lagrangian and Hamiltonian formulation等等,但在這之前,我們單純問一個簡單的問題:
對於一個自由粒子,從固定的A點走到固定的B點,在不受外力的情況下,最短軌跡怎麼求?
很直覺的答案就是,粒子會遵循等速直線運動,軌跡畫出來就是一條直線嘛!
但這裡開始引入一個概念:
大自然有著讓東西極小或極大化的特性。所以我們的目標就是,希望能透過數學描述這個現象,找到一個大自然會最小化的物理量,得出這條最短軌跡。
建立最短軌跡的公式
那我們開始來算,首先A點到B點,中間路徑隨便怎麼畫,但我們把它分成一段一段的
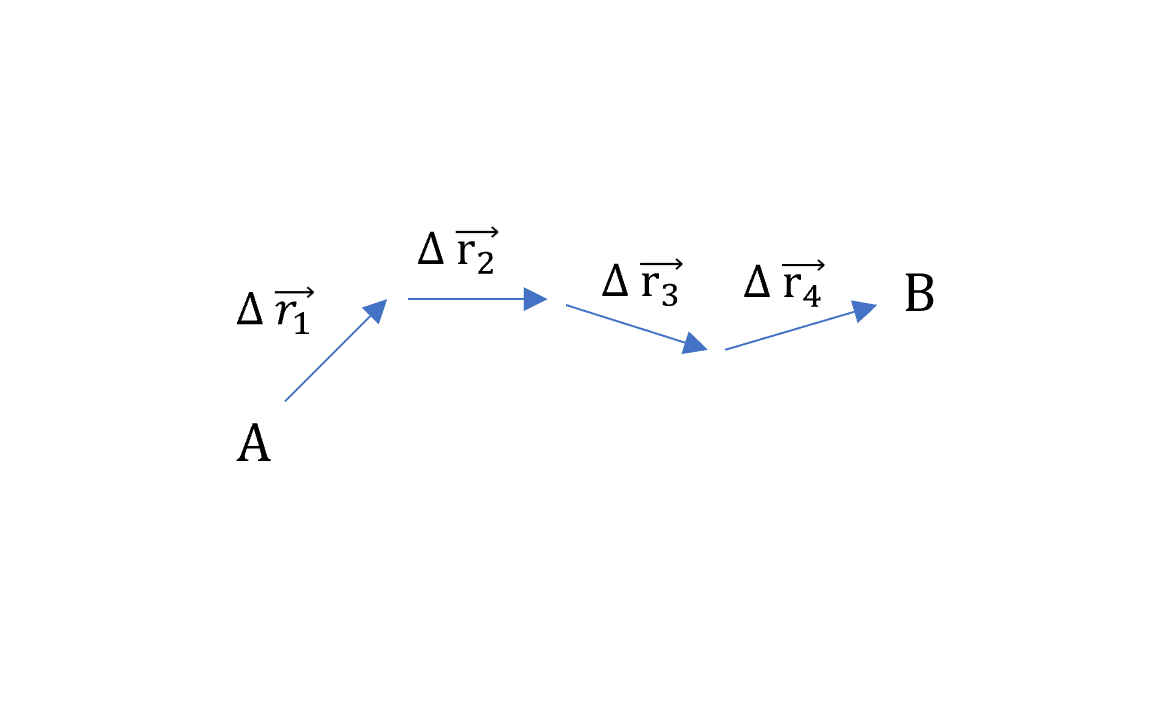
總和的值就是我們想要最小化的路徑。
但是!
想要最小化這個公式,有四個注意的點:
- 這個公式只有確保是最小路徑,沒有引入「等速」的概念。沒有保證 \(\|\Delta\vec{r}_1\| = \|\Delta\vec{r}_2\| = \cdots = \|\Delta\vec{r}_N\|\),也沒有說明每一小段走的時間相同。
- 同理,沒有引出「直線」的概念。
- 應要增加時間的條件,限制整段路徑在總時間T內完成,並平分成N段,每段時間長度為T/N。
- 要繼續用絕對值來求有點難算,我們可以轉成平方項來處理。
綜合以上,我們改求想要最小化這個公式:
\[\|\Delta\vec{r}_1\|^2+\|\Delta\vec{r}_2\|^2+...+\|\Delta\vec{r}_N\|^2\]然後確認最小化這個公式保證「直線」與「等速」:
- 證明直線:
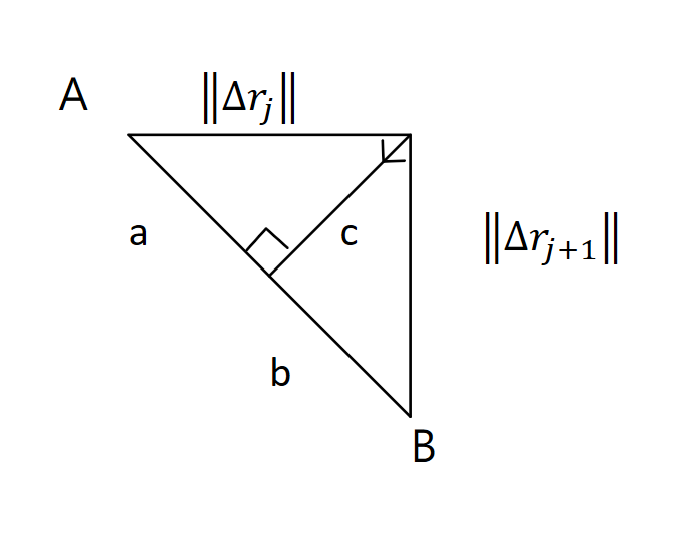
我們將問題先縮到局部的範圍,最後再放大至全域,因此可以先看兩點 \(\Delta\vec{r}_j\)、\(\Delta\vec{r}_{j+1}\)。假設先接受一個最短路徑的答案後,調整中間經過的位置,使之稍微偏離,如果算出來的數學量比較大,那就證明原本給的答案就是最小的。
如下圖所示,原本A到B是直線a+b,現在稍微偏離一點走\(\|\Delta\vec{r}_j\|+\|\Delta\vec{r}_{j+1}\|\),算出來恆大於a+b,所以最小化兩者平方和的結果,一定是直線。
-
證明線段等長:
\[a+b=\|\overline{AB}\|(\text{fixed})\]
若最小化
\[a^2+b^2\]可得(這裡簡單的取\(a^2+(L-a)^2\)微分就可導出來)
\[a = b = \frac{1}{2}\|\overline{AB}\|\]
至此,還差最後一步。對於切的N段,N要多大呢?
如果固定長度下,切更細,分更多段,感覺應該能更精確?但是別忘了,這是固定長度!也就是說,如果長度是一公尺,切一千份,每一份都是\((\frac{1}{10^3})^2\),算出來就是
改切一億份
\[(\frac{1}{10^8})^2 \times 10^8 = \frac{1}{10^8}\]
那我越切越細,最小化的公式算出來的數值不就愈來越小了?
這只是我們Formulate的關係,那就再把數量乘回來吧,不會影響我們要做的事情,因此最小化的公式改成:
然後數量級改一下變成有限項
\[\left[\left(\frac{\Delta\vec{r}_1}{\frac{1}{N}}\right)^2+\left(\frac{\Delta\vec{r}_2}{\frac{1}{N}}\right)^2+\cdots+\left(\frac{\Delta\vec{r}_N}{\frac{1}{N}}\right)^2\right]\cdot\frac{1}{N}\]把前面時間的概念放回來(\(\Delta{t_1} = \Delta{r_1}\) 走的時間)
\[\because \quad \frac{1}{N} \propto \frac{T}{N} = \Delta{t_1}(=\Delta{t_2}=\cdots=\Delta{t_N}), \qquad \Delta{t_j} \equiv \frac{T}{N}\] \[\therefore \left[\left(\frac{\Delta\vec{r}_1}{\frac{1}{N}}\right)^2+\left(\frac{\Delta\vec{r}_2}{\frac{1}{N}}\right)^2+\cdots+\left(\frac{\Delta\vec{r}_N}{\frac{1}{N}}\right)^2\right]\cdot\frac{1}{N}\] \[\Rightarrow\left[\left(\frac{\Delta\vec{r}_1}{\Delta t}\right)^2+\left(\frac{\Delta\vec{r}_2}{\Delta t}\right)^2+\cdots+\left(\frac{\Delta\vec{r}_N}{\Delta t}\right)^2\right]\cdot\Delta t\] \[\Rightarrow\int_{0}^{T} \left(\frac{d\vec{r}}{dt}\right)^2\,dt\]這個就是最後我們在求最短路徑時,要最小化物理量的公式積分形式。