
(28) 變分 Hamiltonian-Jacobi Theory ─ Canonical Transformations,起始和終點座標轉換
前言
上一節說到,當我們知道真實軌跡
\[S^*(q_0,t_0,q_f,t_f)=\int p dq-Hdt\]就可以知道系統的完全動態
\[\left\{ \begin{array}{ll} p_0=-\frac{\partial S^*}{\partial q_0}\\ H_0=\frac{\partial S^*}{\partial t_0}\\ p_f=\frac{\partial S^*}{\partial q_f}\\ H_f=-\frac{\partial S^*}{\partial t_f} \end{array} \right.\]其中因為
\[p_0=-\frac{\partial S^* (q_f, q_0, t_f, t_0)}{\partial q_0}\]再藉由$p_0$反推
\[q_f=q_f(q_0,p_0,t_0,t_f)\]這樣只要知道 inital condition $(q_0, t_0)$,就能推得$q_f(t_f)$和$p_f$。
Canonical Transformation
算
\[dS^*(q_f,q_0,t_f,t_0) = \frac{\partial S^*}{\partial q_f} dq_f+\frac{\partial S^*}{\partial q_0} dq_0+\frac{\partial S^*}{\partial t_f} dt_f + \frac{\partial S^*}{\partial t_0} dt_0\]則可知 Identity (代進去等號左右相等)
\[p_fdq_f-H_fdt_f=p_0dq_0-H_0dt_0+dS^*\]對照第二十六節學的
\[\vec{p}d\vec{q}-Hdt=\vec{P}d\vec{Q}-Kdt+dF\]把$dS^*$想成$dF$,不就是Canonical Transformation嗎!
所以我們可以把起始點$(q_0,p_0,t_0)$到終點$(q_f,p_f,t_f)$想成是座標轉換,兩者都視作在extended space coordinate,當然我們也可以反過來想,不論是幾秒之後發生的座標,都可以轉回成initial condition的樣子。
變分
那就一樣來做變分吧!以下藍色是真實軌跡,灰色是變分軌跡,從起始點到終點,注意一般來說,不一定非要$t=0$或是$t=\text{fixed}$的平面。
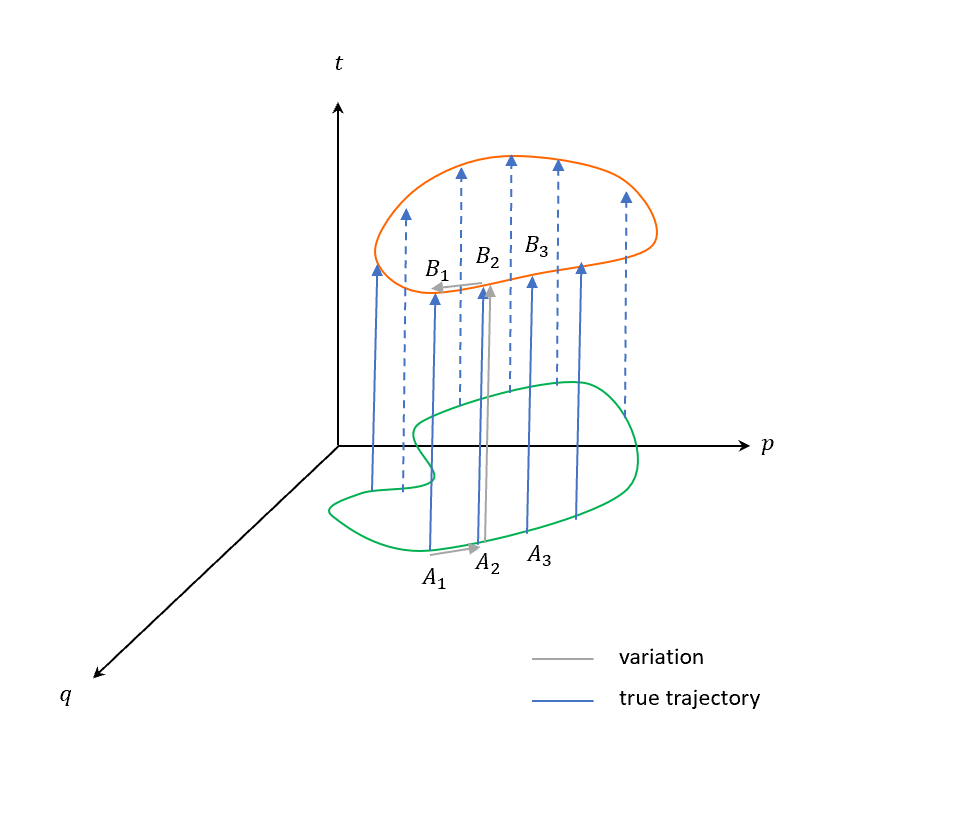
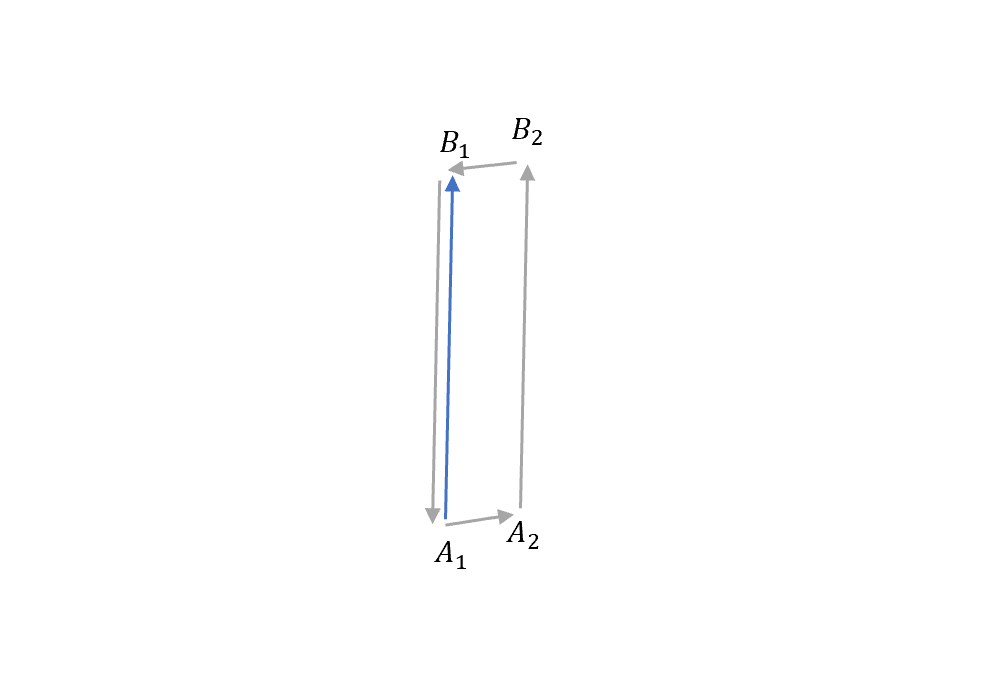
拆解成三個分段做變分
\[\int_{A_1\to B_1} (pdq-Hdt)=\int_{A_1\to A_2}+\int_{A_2\to B_2}+\int_{B_2\to B_1}\]這樣就相當於,繞一圈的路徑積分是0!
所以我們可以把第一張圖切成很多一圈一圈的路徑,每一圈都是0,全部積完也是0!
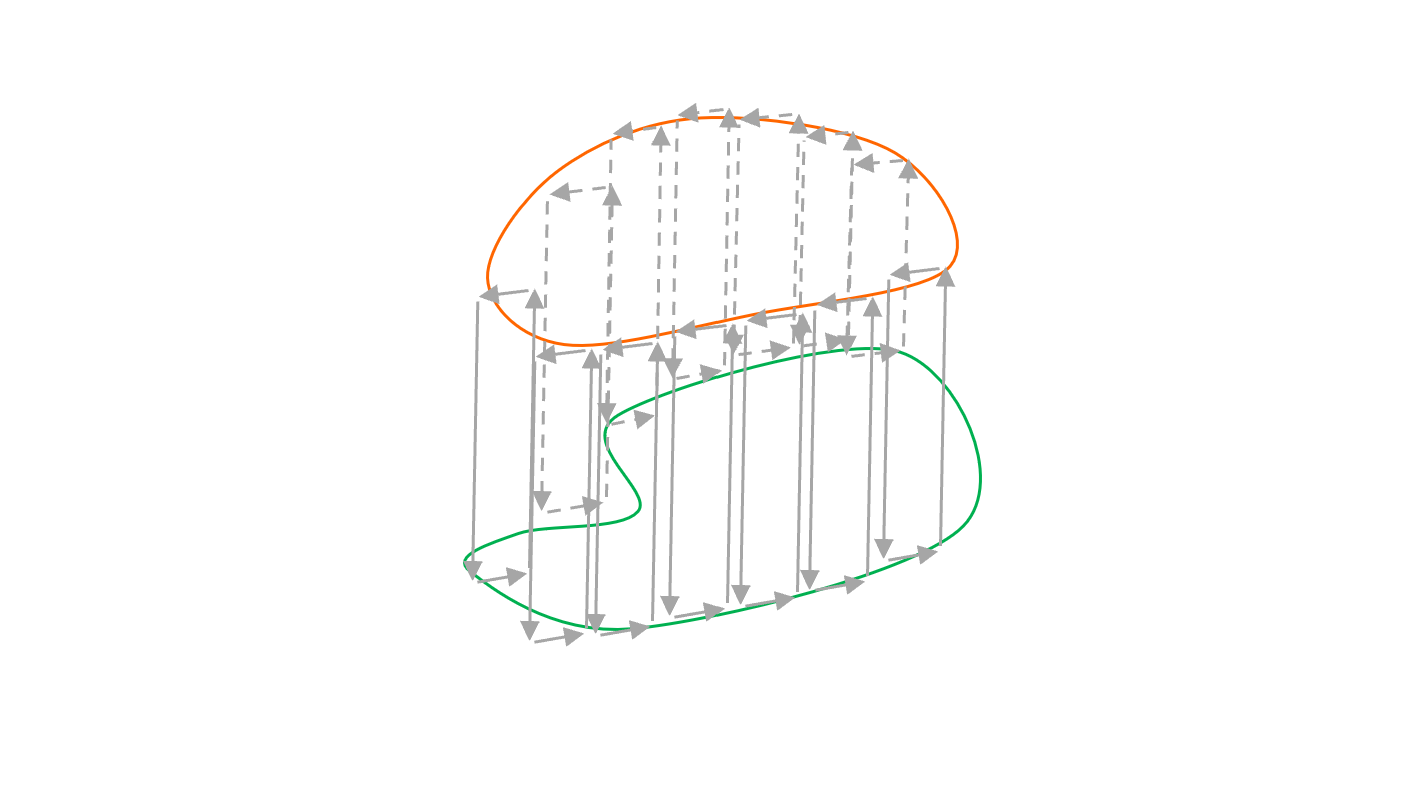
然後積分過程中,因為長條邊會相消,所以可以得出橘圈加綠圈等於0。
\[\int_{B_1\to B_2 \to B_3 \to B_1} pdq-Hdt = \int_{A_1\to A_2 \to A_3 \to A_1} pdq-Hdt\\ \oint_{\text{green circle}}p_0 dq_0-H_0 dt_0=\oint_{\text{orange circle}}p_f dq_f-H_f dt_f\](不過這也本來就是Canonical transformation的性質,變換座標後積分完會一樣)
從這個說明可以先知道一件事情:若想要求得一個系統的演化,就變換回initial coordinate $(q_0, p_0, t_0)$,一切就都會很清楚。
Canonical Transformation $$ (q,p,H)\to(Q,P,K) $$
例子:從初始條件看,$K=0$沒有Dynamics
按照前面的說明,我們現在進一步來看,選定初始條件
\[t_0=\text{fixed},\quad dt=0\\ (q_0,p_0)=\text{known}\]解法
從前面知道
\[p_fdq_f-H_fdt_f=p_0dq_0-H_0dt_0+dS^*\]因為初始條件$dt=0$,所以
\[p_fdq_f-H_fdt_f=p_0dq_0-H_0\cdot 0+dS^*\]等號右邊第二項,我們可以利用數學技巧改寫成以下,反正都是0
\[p_fdq_f-H_fdt_f=p_0dq_0-0\cdot d{t_f}+dS^*\]這麼做有個好處,$K$(轉換後的$H$)就可以視為0了!
$K=0$的含意
記得
\[\frac{d\vec{Q}}{dt}=\frac{\partial K}{\partial \vec{P}}\\ \frac{d\vec{P}}{dt}=-\frac{\partial K}{\partial \vec{Q}}\]若$K=0$,那就沒有dynamic啦!$(Q, P)$都不會隨著時間變動了,代表說當我們做canonical transformation,去map
\[(q_f,p_f,H_f)\to(Q,P,K)\\ (q_f,p_f,t_f)\to(q_0,p_0,t_0)\]可知
\[Q=q_0=\text{constant }(\because K=0)\\ P=p_0=\text{constant }(\because K=0)\\ t_0=\text{all the same}\]這說明了什麼?其實是一個很廢的結果,就是若有人問你一個系統的演化,你跟他回答:「我知道這個系統有一個不變量,叫做起始位置和速度」。
那不是必然嗎!我們例子最一開始的假設就是定你想要從哪裡出發了,初始條件本來就已知,初始條件不變,真的聽君一席話,還是一席話。
可是這裡想要表明的重點是,我們真的能用Canonical Transformation從initial的座標角度看了!
Hamiltonian-Jacobi Equation
但如果接續這個例子繼續看
\[p_fdq_f-H_fdt_f=p_0dq_0+dS^*\]還是有一個問題,我們看起來還是必須知道真實軌跡$S^* $的functional form,才會知道$(q(t),p(t))$的系統動態演化。
而這時Hamiltonian-Jacobi Equation就來了,這個Equation告訴我們不用解軌跡了!
轉個方式想,我們不直接解真實軌跡,我們解另外一個問題。
因為$S^* $會滿足特定的PDE(partial differential equation),所以我們不用真的去解$(q(t),p(t))$,只要解PDE,就能夠得到particle dynamics。
這個PDE就一樣是我們提過的
\[p_f=\frac{\partial S^*}{\partial q_f}\\ H_f=-\frac{\partial S^*}{\partial t_f}=-H\bigg|_{t_f}\]加上我們知道functional form of $H(q,p,t)$
所以以上代進去就會知道
\[-\frac{\partial S^*}{\partial t_f}=H\left(q_f,\frac{\partial S^*}{\partial q_f},t_f\right)\]一旦這個PDE解出來,就是屬於場論(field theory),我們不用再去單獨追蹤和解一個粒子的軌跡,而是透過解出整個場的PDE,解完後,軌跡自然就知道了。
要注意,我們要解的PDE並沒有$(t_0,q_0)$的變數,代表這兩個是可以自由選擇的,所以解這個的PDF自由度無限大。
舉例來說,我們可以把這個當作是initial value problem for S。
首先找個已知的定
\[S(q,t=t_0)\equiv f(q)\]代表已知
\[\frac{\partial S}{\partial q}=\frac{\partial f}{\partial q}\]就能知道
\[H\left(q_f,\frac{\partial S}{\partial q_f},t_f\right)=-\frac{\partial S}{\partial t_f}\]整理一下
- $q$一開始已知,因為$\frac{\partial S}{\partial t_f}$知道,所以知道下一秒在$q$的$S$。
- 也因為$\frac{\partial S}{\partial q}$知道,所以也會知道下一秒在隔壁$q’$的$S$。
- 結合就會知道速度$\frac{dS}{dt}$。
- 繼續這樣推,空間中每個$S$都能知道,下一個瞬間的$S$也都可以算出來。
- 整個軌跡就都能求出來了,所以主要就是看一開始的$f(q)$怎麼取。
所以為了避免自由度無限大的事情,你可以自己限制在某N個DOF,去加一些調整的變數
\[S=S(q,t,\vec{c}),\quad\vec{c}=\text{N tunable paramter}\]例子
舉一維例子,我們知道
\[H=\frac{p^2}{2m}+V(q)\]套用Hamiltonian-Jacobi Equation
\[-\frac{\partial S^*}{\partial t_f}=H\left(q_f,\frac{\partial S^*}{\partial q_f},t_f\right)\]代進去得
\[\frac{1}{2m}\left(\frac{\partial S}{\partial q}\right)^2+V(q)=-\frac{\partial S}{\partial t}\]接著用分離變數法,把$q,t$分開。
定
所以
\[\frac{1}{2m}\left(\frac{dw}{dq}\right)^2+V(q)=-\frac{dw_0}{dt}\equiv E\]($E$常數其實就是$\frac{\partial S}{\partial t}$,就是total energy的物理量。)
簡單積分移項
\[w_0=-E(t-t_0)\\ w=\pm\int_{-q}^{q}\sqrt{2m(E-V(q))}dq\]得
\[S=\pm\int_{q_0}^{q}\sqrt{2m(E-V(q))}dq-E(t-t_0)\]不過這還不是真實軌跡$S^*$,因為$E$還沒定好。
這邊直接來個物理直覺猜測吧,就設(我們簡單取正號)
\[S^*\equiv S\left(E=\frac{p_0^2}{2m}+V(q_0)\right)\]代回去驗證看看
(小小note一下,這裡對$q_0$微分,$q_0$是變數,所以萊布尼茲規則需要對這個是變數的下限做處理,而在物理理解上,初始條件的位置也被視為可變的,要研究對初始條件的敏感性,所以等號右邊的第一項,正是萊布尼茲規則對下限變數處理的結果)
\[-p_0=\frac{\partial S^*}{\partial q_0}\\ -p_0=-\sqrt{2m(E-V(q_0))}+\int_{q_0}^{q}\frac{\partial}{\partial E}\sqrt{2m(E-V(q))}\frac{\partial E}{\partial q_0}dq-(t-t_0)\frac{\partial E}{\partial q_0}\]等號左邊和等號右邊第一項相等,可以消掉
\[\frac{\partial E}{\partial q_0}\left(-(t-t_0)+\int_{q_0}^{q}\sqrt{2m}\frac{\frac{1}{2}}{\sqrt{E-V(q)}}dq\right)=0\\ \Rightarrow\left(-(t-t_0)+\int_{q_0}^{q}\sqrt{2m}\frac{\frac{1}{2}}{\sqrt{E-V(q)}}dq\right)=0\\ \Rightarrow t-t_0=\int_{q_0}^{q}\sqrt{2m}\frac{\frac{1}{2}}{\sqrt{E-V(q)}}dq=\int_{q_0}^{q}\frac{m}{\sqrt{2m(E-V(q))}}dq=\int_{q_0}^{q}\frac{m}{p}dq\]看看我們得到什麼了!
\[t-t_0=\int_{q_0}^{q}\frac{1}{v}dq\\ (\frac{dq}{dt}=v, \quad\frac{dq}{v}=\Delta t)\]完全正確的time dependece!
小結
Hamiltonian-Jacobi Equation 是 PDE,有無限多種DOF(solution),但我們在一維的情況下,用分離變數找到一個常數(tunable parameter),再用物理直覺猜測其為能量,代進去算也確認無誤。