
(19) 變分 Hamiltonian vs Lagrangian
前面簡述完Hamiltonian和Lagrangian,乍看之下會覺得$H$比$L$多了一個自由度$(p,q)$,我們下面用簡單的等加速運動例子和角動量守恆來看待這件事情。
比較一:加速
Lagrangian
牛頓力學和$L$的EOM告訴我們
\[\frac{d^2 x}{dt^2}=a=\text{some constant}\]真實軌跡的解是
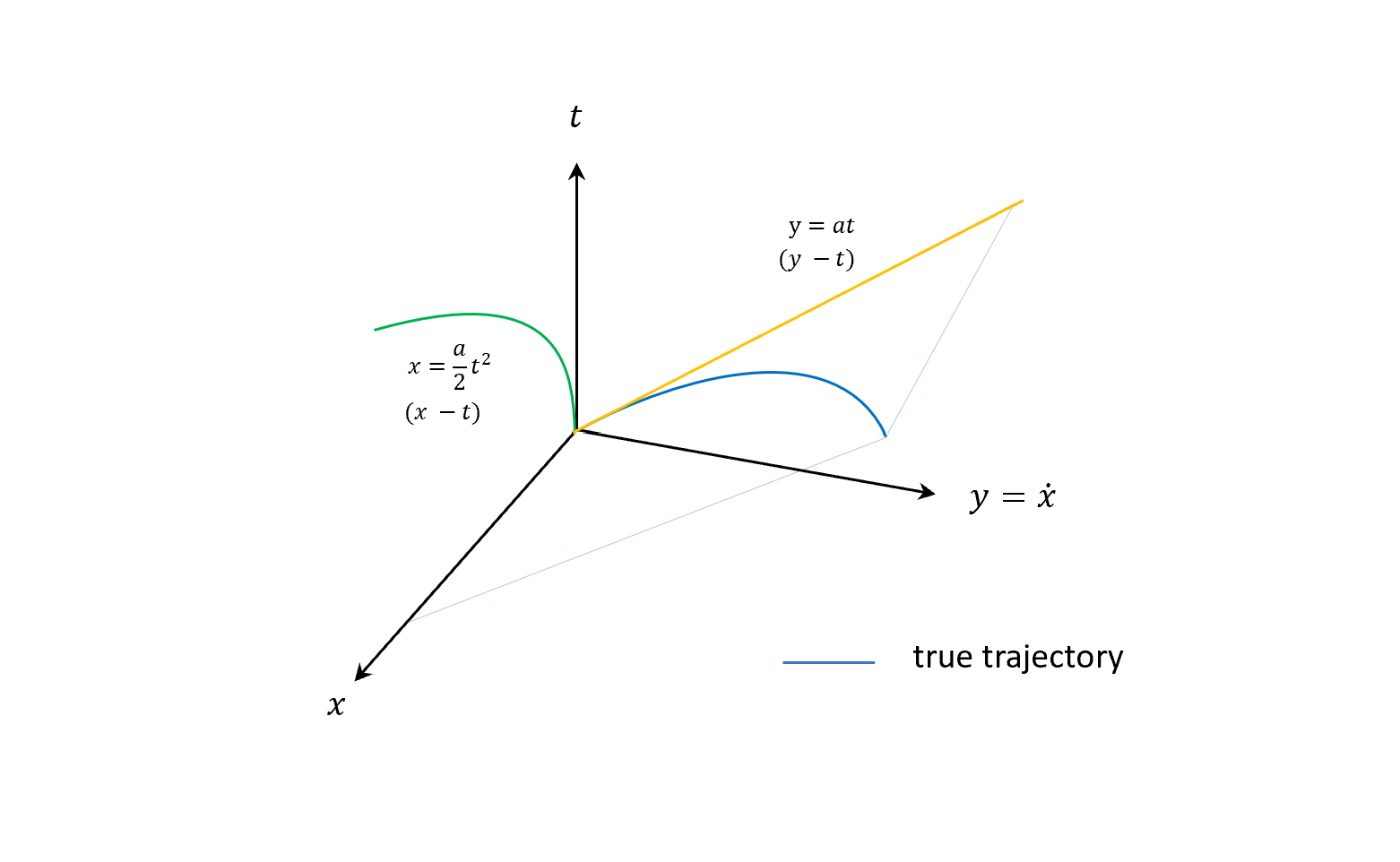
\[\left\{ \begin{array}{ll} x(t)=\frac{a}{2}t^2\\ \dot{x}(t)=at \end{array} \right.\]現在令
\[y=\dot{x}\]把解畫在$x-y-t$上面,可以得到$x-t$是拋物線,$y-t$是直線,然後顯示到3-D空間的話,true trajectory會是藍色那條。
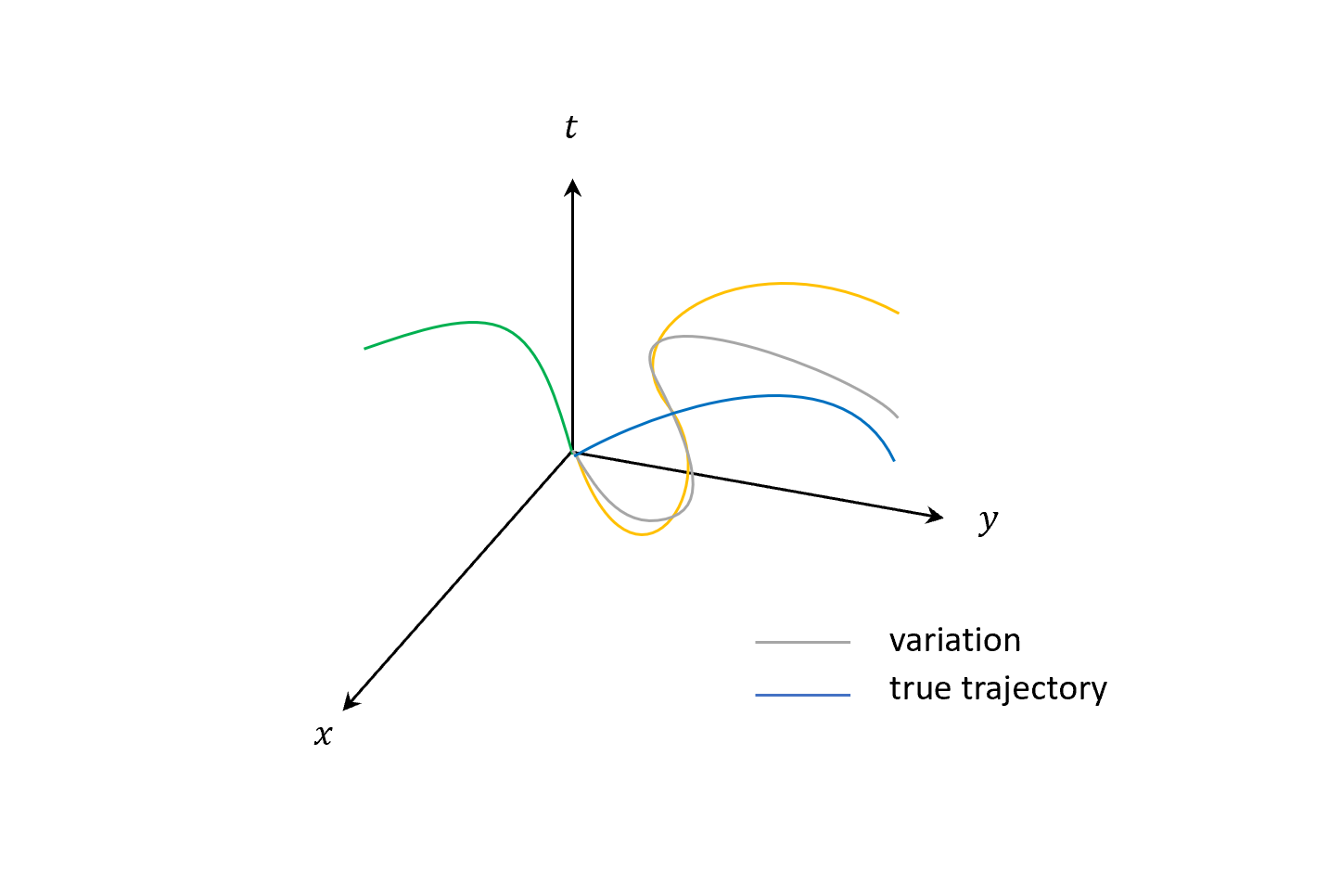
現在加一點variation,$\epsilon$是微小的正數,灰色就是variation的軌跡
\[\left\{ \begin{array}{ll} x(t)\equiv x^*(t)+\epsilon\sin\frac{2\pi t}{T}\\ \dot{x}(t)=\dot{x^*}(t)+\epsilon 2\pi \cos\frac{2\pi t}{T} \end{array} \right.\]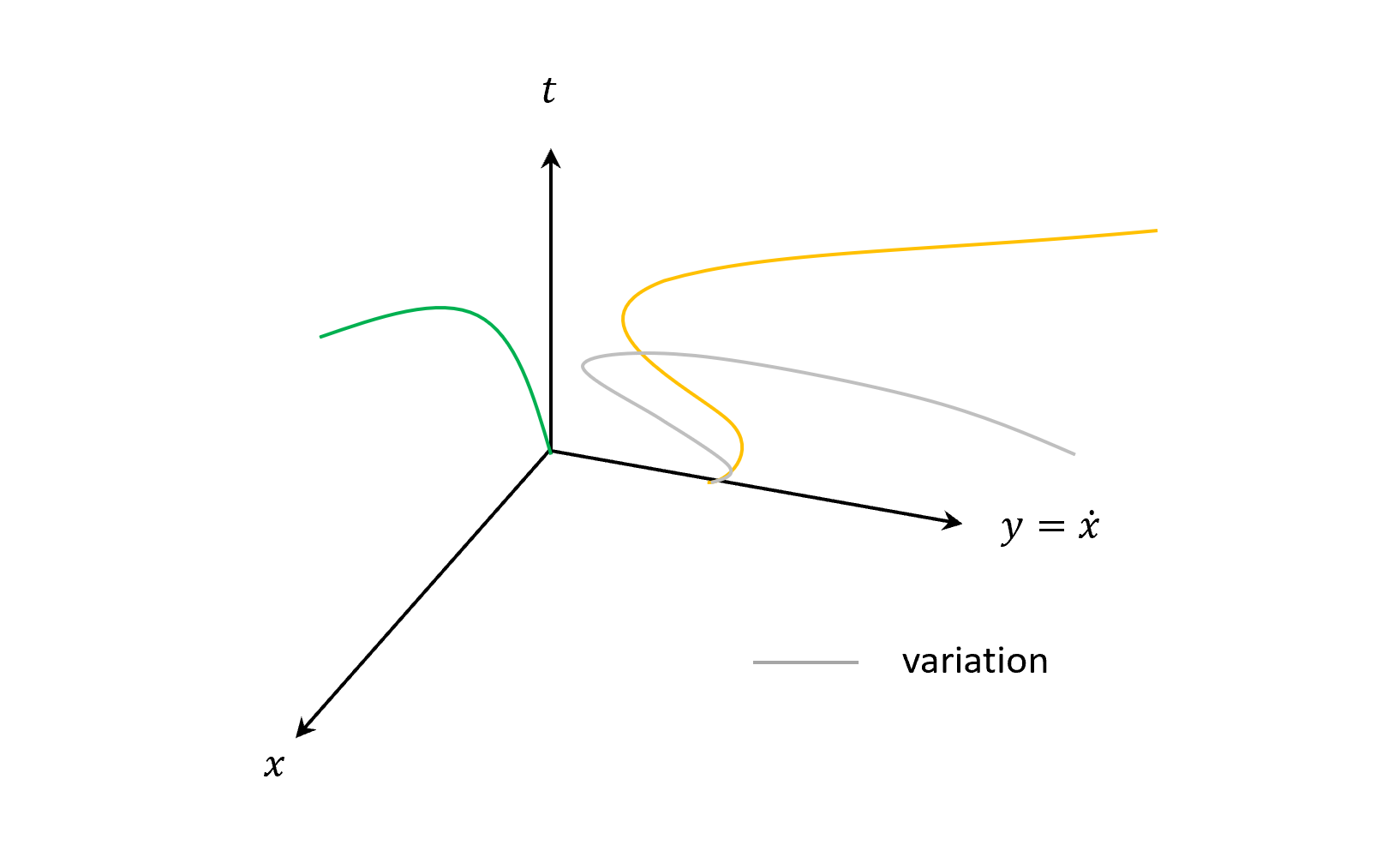
簡而言之
\[x(t)\equiv x^*(t)+\delta x(t)\\ y(t)\equiv y^*(t)+\delta y(t)\\ \delta (\text{something})=\text{small variation at something}\]注意其中
\[\delta y=\diff{\delta x}{t}\]是我們自己強制定義的,所以若我們決定綠線$x(t)$,橘線$y(t)$就已經被限制住(無自由度),這裡的$\delta y$和$\delta x$的關係緊密。
最後得varitaional principle within the Lagrangian formulation:
若
\[(x(t),y(t))=\left(x^*(t),\diff{x^*(t)}{t}\right)\]是真實軌跡,則
\[\int_{0}^{T} L(x(t),y(t),t)\, dt\]就會是極值。而其中一個自由度的限制是
\[y=\diff{x}{t}\]Hamiltonian
現在換到Hamiltonian,我們改寫EOM,並且先當作數學問題,多個未知的$p$
\[\left\{ \begin{array}{ll} \diff{x}{t}=p\\ \diff{p}{t}=a \end{array} \right.\]真實軌跡
\[\left\{ \begin{array}{ll} x(t)=\frac{a}{2}t^2\\ p=at \end{array} \right.\]畫出來的圖會和前面一樣
現在加variation
\[\left\{ \begin{array}{ll} x(t)\equiv x^*(t)+\epsilon\sin\frac{2\pi t}{T}\\ y(t)=y^*(t)+\delta p(t) \end{array} \right.\]注意這時$\delta p(t)=\delta y$可以是”任意”的小函數,所以原本的綠色線照畫,橘色線不再特定,只要畫過去的3D線可以再投影到綠線就可以了。
最後得varitaional principle within the Hamiltoian formulation:
若
\[(x(t),y(t))=(x^*(t),p^*(t))\]是真實軌跡,則
\[\int_{0}^{T} p(t)\,dx-H(x,p,t)\, dt\]就會是極值。而我們發現
\[p^*(t)=\diff{x^*}{t}\]完全是後見之明。
所以雖然Hamiltonian的自由度更大,想怎麼vary隨便你,但取極值後的true trajectory(真正關心的)和Lagrangian相同!從這點來看的話,Hamiltonian和Lagrangian兩者其實沒有差。
比較二:角動量守恆
從自由度和變分的角度出發,我們知道最基本的變分,就是把真實軌跡拿來當參考值,然後作任意小改變,來得知系統隨時間怎麼變化,然後掌握系統的所有事情。
但其實沒有告訴你一定要考慮所有可能的變化,若只是單純討論某一類特殊的變化,即便僅是得知系統部分的資訊,即便不能知道整個系統動態隨時間的變化,也已經夠了。
現在我們就來看角動量守恆,這個在之前的第十一節和第十二節都有用Lagrangian算過,現在用Hamiltonian來證。
一樣$H$隨著$q,p$的改變,但這個改變我們設只跟$q,p$的長度有關。
(這樣的假設像是討論向心力場這類的問題就可以用,因為動能是$p^2$,位能與中心的距離有關。)
因此我們定 Hamiltonion for a particle is of form:
\[H(\|\vv{q}\|,\|\vv{p}\|)\]加上對著$\hat{n}$軸做旋轉的擾動變量
\[\vv{q}=\vv{q}^*+\epsilon\hat{n}\times\vv{q}^*\\ \vv{p}=\vv{p}^*+\epsilon\hat{n}\times\vv{p}^*\\ \hat{n}: \text{some constant unit vector}\\ \epsilon: \text{arbitraty but small}\]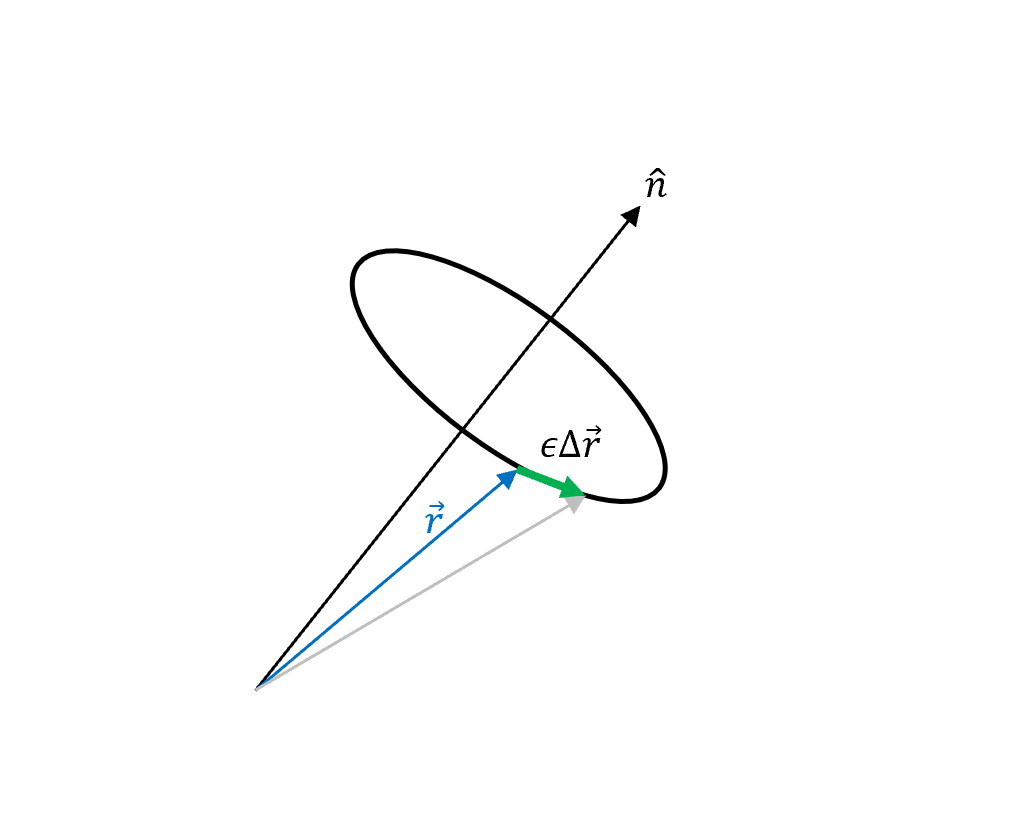
其中$q,p$的擾動量只在$t_1, t_2$間有,表示真實軌跡走一走到某個時間點做改變,在某個時間之後再變回真實軌跡。
\[\left\{ \begin{array}{ll} \theta(t-t_1)-\theta(t-t_2)\\ \theta(t-t_1)-\theta(t-t_2) \end{array} \right.\] \[\theta: \text{heaviside function}\]先算$H$的變分
\[\delta{H}=H(\|\vv{q}\|,\|\vv{p}\|)-H(\|\vv{q}^*\|,\|\vv{p}^*\|)=0\]若只算到$\mathcal{O}(\epsilon)$,那就會是0。
因為
\[\|\vv{r}\|=\|\vv{r}^*+\epsilon\hat{n}\times\vv{r}^*\|\\\]算長度時因為
\[\vv{r}\perp\hat{n}\times\vv{r}\]所以取平方時,兩個內積為0,只會剩下${\vv{r}^* }^2+\epsilon^2(\hat{n}\times\vv{r}^*)^2 $,差別是二階$\epsilon$。
在這裡我們只看一階,$\delta{H}=0$
接著來算變分公式
因此得
\[\hat{n}\cdot\left(\vv{q}^*\times\vv{p}^*\right)\bigg |_{t=t_2}= \hat{n}\cdot\left(\vv{q}^*\times\vv{p}^*\right)\bigg |_{t=t_1}\]把$q$想成長度,$p$是動量,則此式得證角動量守恆。
可以和之前用Lagragian推導做比較,$L$是$q$變化,$\dot{q}$就會被決定下來;$H$是$q,p$都可自由被決定的,但我們可以只關注部分的變動量,得到系統的部分資訊,也能得到有意義且一樣的結果。
總結比較
| Item | Lagrangian | Hamiltonian |
|---|---|---|
| Transformation | From $L$ to $H$: Given $L(q,q’,t) \quad(q’$ 先當作純數學的變數) Define $p\equiv\pdv{L(q,q’,t)}{q’}$ So can express $q’\equiv q’(q,p,t)$ Next define $H(q,p,t) = pq’(q,p,t)-L(q,q’(q,p,t),t)$ |
From $H$ to $L$: Given $H(q,p,t)$ Define $q’\equiv\pdv{H(q,p,t)}{p}$ So can express $p=p(q,q’,t)$ Next define $L(q,q’,t)=p(q,q’,t)q’-H(q,p(q,q’,t),t)$ |
| Formula | 設 $q’(t) \rightarrow \dot{q}(t)$ and consider $I_L \equiv \int_0^T L\left(q, q’ = \frac{dq}{dt}, t\right) \, dt$ |
Consider $I_H \equiv \int_0^T pdq - H(q, p, t) \, dt $ |
| DOF | $ q(t) $ | $q(t), p(t)$ essentially arbitrary |
| B.C. | $q(0) = q^* (0), q(T) = q^* (T)$ | $ q(0) = q^* (0), q(T) = q^*(T) $ |
| Claim | $ q^*(t) $ extremizes $ I_L $ | $(q^* (t), p^ *(t)) $ extremized $ I_H $ |
| Note | One can prove that $ I_L $ is minimized by $ q^*(t) $ under certain conditions such as in the case when $ T $ is small (真實軌跡會是$ I_L $取最小值,也因為自由度比較小,所以若專注在shape trajectory,會比較快找到路走) |
$ I_H $ is only extremized by $ (q^* (t), p^* (t)) $ only. That is, one cannot talk about the minimization of it. (真實軌跡只能說 $ I_H $ 取極值,但因為本來就有較高的自由度去做variation,所以付出的代價就是不一定是最小值) |
最後是兩者Common的性質:
若我們只考慮真實軌跡,則
\[I_L[q^*(t)] = I_H[(q^*(t), p^*(t))]\]Prf:
\[\begin{align*} p^* dq^* - H^* dt &= \left( p^* \frac{dq^*}{dt} - H^* \right) dt \\ &= \left( p^* \frac{dq^*}{dt} - (p^* \dot{q}^* - L(q, \dot{q}, t)) \right) dt \\ &= L dt \end{align*}\]這邊對關於Lagrangian和Hamiltonian的轉換,教科書中常見是用Legendre transformation,但對我現在的理解來說,其實就是降階和做變數變換,以下節錄一段Goldstein的文字
From the mathematical viewpoint, it can however be claimed that the $q$’s and $\dot{q}$’s have been treated as distinct variables. In Lagrange’s equations $\frac{d}{dt}\left(\frac{\partial L}{\partial \dot{q}_i}\right)-\frac{\partial L}{\partial q_i}$, the partial derivative of $L$ with respect to $q_i$ means a derivative taken with all other $q$’s and all $\dot{q}$’s constant. Similarly, in the partial derivatives with respect to $\dot{q}$, the $q$’s are kept constant. Treated strictly as a mathematical problem, the transition from Lagrangian to Hamiltonian formulation corresponds to changing the variables in our mechanical functions from $(q, \dot{q},t)$ to $(q, p,t)$, where $p$ is related to $q$ and $\dot{q}$ by $p_i=\frac{\partial L(q_j, \dot{q}_j, t)}{\partial \dot{q}_i}$. The procedure for switching variables in this manner is provided by the Legendre transformation, which is tailored for just this type of change of variable.
─ (Goldstein, H.), Classical mechanics. Pearson Education India, 3rd edn, (p.334).
$L$ & $H$ 公式例子
例子一:傳統力學
假設 Lagrangian 為
\[L=\sum_{j}\frac{m}{2}\dot{\vv{r_j}}^2-V(\vec{r})\]其中$j$是partical index,而
\[\vec{r}\equiv(\vec{r_1}, \vec{r_2},\cdots)\]現在改寫成矩陣的形式
\[L = \frac{1}{2}\dot{\vv{r}}^t\cdot\hat{M_0}\cdot\dot{\vv{r}}-V(\vec{r})\\ \hat{M_0}= \begin{pmatrix} m_1 & 0 & 0 & 0\\ 0 & m_2 & 0 & 0\\ 0 & 0 & \ddots & 0\\ 0 & 0 & 0 & m_j \end{pmatrix}\]接著定義
\[\begin{align*} \vec{q}\equiv\vec{f}^{-1}(\vec{r})&\Rightarrow\vec{r}=\vec{f}(\vec{q})\\ \hat{R}\equiv\pdv{\vec{f}}{\vec{q}}&\Rightarrow\dot{\vv{r}}=\pdv{\vec{f}}{\vv{q}}\cdot\dot{\vv{q}}=\hat{R}\cdot\dot{\vv{q}} \end{align*}\]來描述motion,所以
\[\begin{align*} L &= \frac{1}{2}\dot{\vv{r}}^t\cdot\hat{M_0}\cdot\dot{\vv{r}}-V(\vec{r})\\ & = \frac{1}{2}\left(\hat{R}\dot{q}\right)^t\cdot\hat{M_0}\cdot\left(\hat{R}\dot{\vv{q}}\right)-V\left(\vv{f}(\vv{q})\right)\\ &=\frac{1}{2}\dot{\vv{q}}^t{\hat{R}}^t\hat{M_0}\hat{R}\dot{\vv{q}}-V\\ &\equiv\frac{1}{2}\dot{\vv{q}}^t\hat{M_1}\dot{\vv{q}}-V \end{align*}\]其中$V$被視為$\vec{q}$的函數,$\hat{M_1}$則是symmetrix “effective” mass matrix (不一定有m的因次)。
代回Hamiltonian,知
\[\vv{p}\equiv\pdv{L}{\dot{\vv{q}}}=\hat{M_1}\cdot\dot{\vv{q}}\\ \dot{\vv{q}}=\frac{1}{\hat{M_1}}\vv{p}\]則
\[\begin{align*} H&\equiv\vv{p}^t\cdot\dot{\vv{q}}-L\\ &=\vv{p}^t\cdot\frac{1}{\hat{M_1}}\vv{p}-\frac{1}{2}\vv{p}^t\frac{1}{\hat{M_1}}\hat{M_1}\frac{1}{\hat{M_1}}\vv{p}+V\\ &=\frac{1}{2}{\vv{p}}^t\cdot\frac{1}{\hat{M_1}}\cdot\vv{p}+V\\ &=\color{red}{\left(\frac{p^2}{2m}+V\right)} \end{align*}\](就是總能量(動能+位能),並且這個其實也可以對應之後讀量力薛丁格方程求穩態的Time-independent function的Hamiltonian Operator表示了)
例子二:加入電場
\[L = \frac{m}{2}\dot{\vv{q}}^2-e\phi+e\dot{\vv{q}}\cdot\vv{A}\]其中
\[\vv{q} \text{: 3D cartesion coordinate}\\ \phi \text{: scalar potential}\\ \vv{A} \text{: vector potential}\\ e \text{: charge of the partical}\]canonical momentum conjugate to $\vv{q}$ is
\[\vv{p}\equiv\pdv{L}{\dot{\vv{q}}}=m\dot{\vv{q}}+e\vv{A}\\ \dot{\vv{q}}=\frac{\vv{p}-e\vv{A}}{m}\]注意這裡可以看到$\vec{p}$不再是mechanical momentum $m\dot{\vec{q}}$!
一樣來算Hamiltonian
\[\begin{align*} H&=\vv{p}\dot{\vv{q}}-L\\ &=\vv{p}\cdot\left(\frac{\vv{p}-e\vv{A}}{m}\right)-\left(\frac{m}{2}\left({\frac{\vv{p}-e\vv{A}}{m}}\right)^2-e\phi+e\frac{\vv{p}-e\vv{A}}{m}\cdot\vv{A}\right)\\ &=\frac{(\vv{p}-e\vv{A})^2}{m}-\frac{m}{2}\left(\frac{\vv{p}-e\vv{A}}{m}\right)^2+e\phi\\ &=\frac{(\vv{p}-e\vv{A})^2}{2m}+e\phi \end{align*}\]